هل تجرؤ على متابعة فكرة تبدو مستحيلة؟
هل ستتابع فكرة تراها شبه مستحيلة التحقيق في ظل إمكانيات محدودة، وضيق الوقت، وقلة الدعم؟ أم ستغلق الباب قبل أن تمنح نفسك فرصة للتحدي؟
من الفكرة إلى الواقع: رحلة بناء روبوت دلتا
تخيل ذراعاً آلية سريعة كالبرق، تتحرك بدقة مذهلة لالتقاط عناصر من خط إنتاج متحرك ووضعها في مكانها المحدد بلا أدنى خطأ. هذا ليس مشهداً من فيلم خيال علمي، بل هو الواقع الذي حققناه: تصميم وتنفيذ ذراع روبوتية تفرعية من نوع “دلتا روبوت” متكاملة مع نظام رؤية حاسوبية.
البداية: حيث تلتقي الفكرة بالرياضيات والهندسة
كل شيء يبدأ بفكرة. فكرتنا كانت بناء روبوت دلتا، المعروف بسرعته ودقته، مثالياً لأتمتة خطوط التعبئة والتغليف.
كانت أولى خطواتنا الغوص في عالم النماذج الرياضية. درسنا بعمق النماذج المباشرة والعكسية لحركة الذراع، لأن أي حركة خاطئة تعني فقدان الهدف. بدون هذه الخوارزميات، يبقى الروبوت مجرد هيكل بلا قيمة.
المحاكاة: التجربة الآمنة قبل التنفيذ
قبل أن نصنع أي قطعة، لجأنا إلى العالم الافتراضي. باستخدام MATLAB للنمذجة وROS للتحكم في الزمن الحقيقي، أنشأنا نسخة رقمية كاملة للروبوت، واختبرنا خوارزميات الحركة والتحكم بدقة.
هذه المرحلة لم توفر الوقت والمال فحسب؛ بل سمحت لنا بالخطأ – والاستمتاع به – لأن تكلفة الفشل هنا كانت مجرد ضغطة زر.
التحديات الميكانيكية: الدروس من أرض الواقع
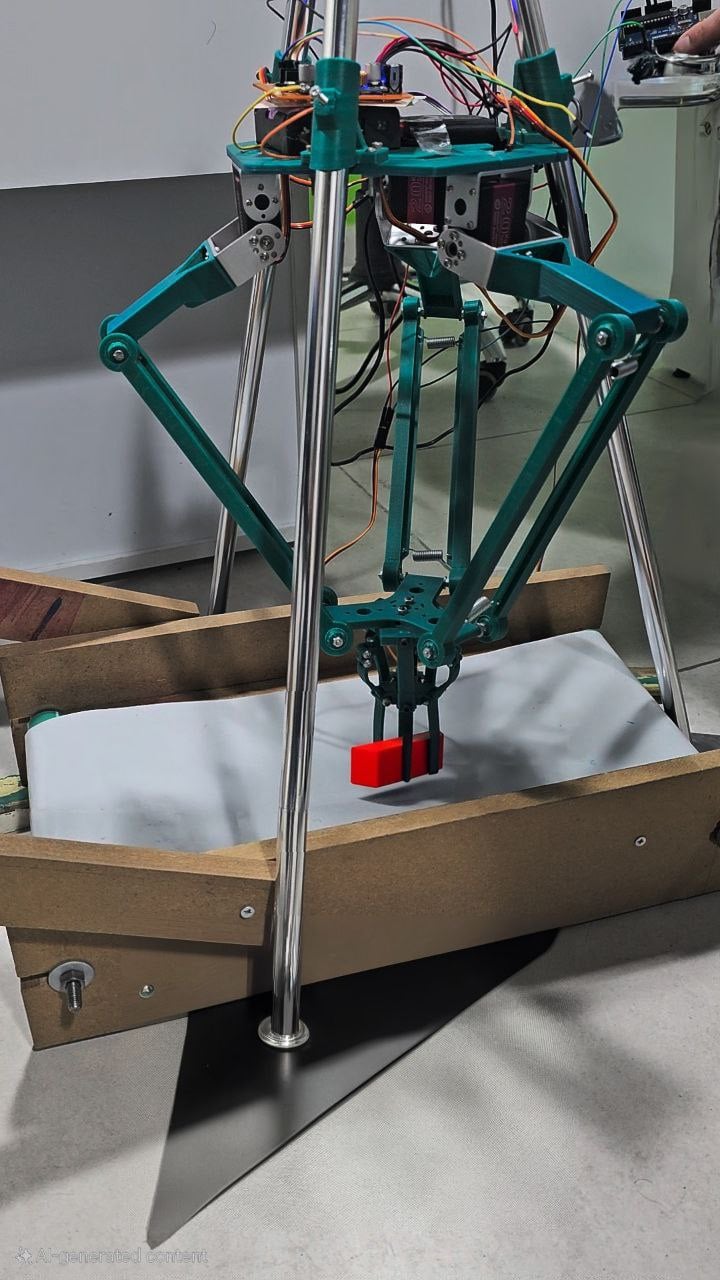
بثقة كبيرة، انتقلنا إلى مرحلة التنفيذ العملي. اعتمدنا على تقنية الطباعة ثلاثية الأبعاد لصنع هيكل الروبوت، مما منحنا مرونة هائلة في التصميم والتعديل السريع، لكنها أيضاً وضعتنا أمام تحديات حقيقية.
أبرزها كان المفصل الكروي (Ball Joint) الذي عانى من ضعف في الاستقرار والدقة تحت الضغط المتكرر.
بعد أن فشل المفصل الكروي للمرة الخامسة، جلسنا صامتين أمام النموذج، كاد اليأس أن يسيطر علينا، ولكن رغم كل شيء، قررنا أن نعيد التفكير والتصميم حتى توصلنا إلى حل عملي أبسط وأكثر كفاءة.
هنا تعلمنا أن النجاح ليس ضربة حظ، بل سلسلة من المحاولات المتكررة.
إضافة الرؤية: الروبوت يرى ويتخذ القرار
لكي يكون الروبوت عملياً، لا يكفي أن يتحرك بسرعة، بل يجب أن يرى ويميز. لذلك أضفنا نظام رؤية حاسوبية باستخدام كاميرا ومعالجة صور.
أصبح الروبوت قادراً على:
- تحديد موقع الأجسام على خط الإنتاج.
- تمييز الهدف عن باقي العناصر.
- حساب إحداثيات دقيقة وإرسالها إلى وحدة التحكم.
وهكذا تحولت الذراع من مجرد أداة ميكانيكية إلى نظام ذكي يتفاعل مع بيئته.
النتيجة: خط إنتاج مصغّر
دمجنا كل هذه المكونات معاً في نموذج أولي يحاكي بيئة خطوط الإنتاج.
اليوم، الذراع تتحرك بسرعة ملحوظة، تلتقط الأجسام من السير وتضعها في مواقع محددة مسبقاً، مع نسبة دقة عالية.
قد لا يكون هذا خطاً صناعياً كاملاً بعد، لكنه إثبات عملي أن الفكرة قابلة للتنفيذ والتطوير.
الخلاصة: أبعد من مجرد مشروع جامعي
هذا المشروع لم يكن مجرد تدريب أكاديمي، بل خطوة حقيقية نحو أنظمة روبوتية قابلة للتطبيق في المصانع قريبًا، ويظهر كيف يمكن للشباب العرب ابتكار حلول عملية بدل استيرادها.
في النهاية، لم يكن دلتا روبوت مجرد ذراع آلية، بل تجربة أثبتت أن الفكرة يمكن أن تتحول إلى واقع عندما يلتقي الإصرار بالشغف، والرياضيات بالهندسة، والبرمجة بالميكانيك.
ما الفكرة التي تراها مستحيلة اليوم، وهل ستمنح نفسك فرصة لتحويلها إلى واقع؟